UOCT Vehicle Monitoring
Real-time CV pipeline over 50 RTSP cameras. Detection, tracking, and per-lane traffic metrics at 25 FPS.
Context
Santiago's traffic authority (UOCT) needed a system to extract traffic metrics from their existing camera network automatically — without storing any video or images for privacy reasons. All processing had to run on-premise inside the UOCT network.
Hardware & Infrastructure
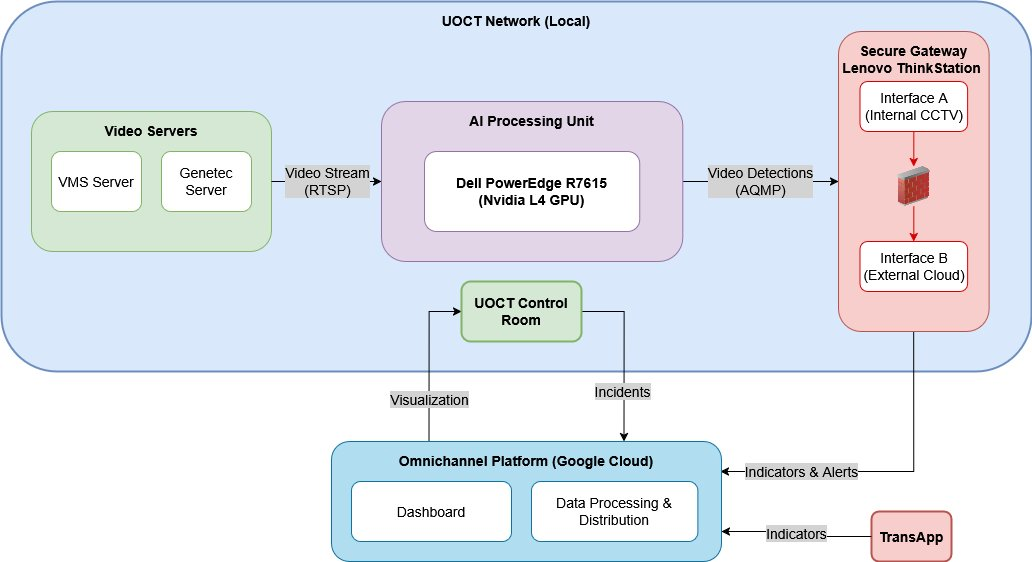
I selected and provisioned the on-premise hardware: a Dell PowerEdge R7615 with an Nvidia L4 GPU for inference, and a Lenovo ThinkStation as a secure gateway isolating the UOCT internal network from the external cloud. The gateway routes processed detections outward without exposing the camera feeds.
Detection & Tracking
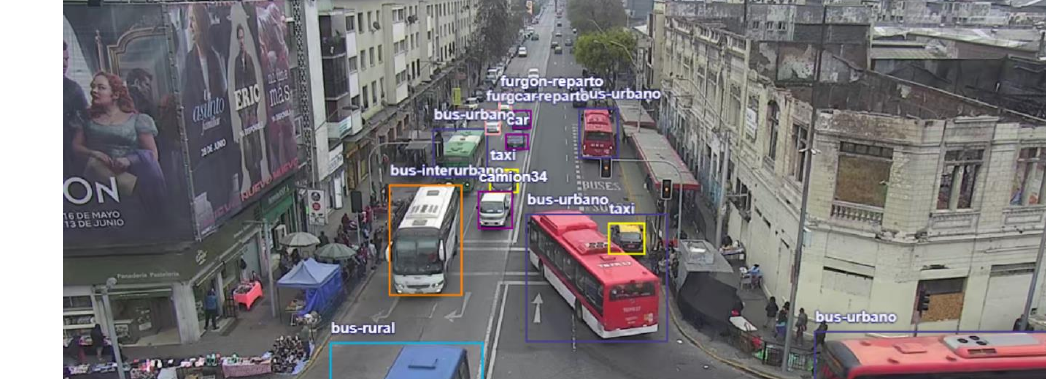
YOLOv11 fine-tuned on a custom dataset of Santiago street cameras covering 15+ vehicle classes. ByteTrack handles multi-object tracking across frames. The system processes 50 RTSP streams simultaneously at 25 FPS. No frames are stored at any point.
Lane Annotator
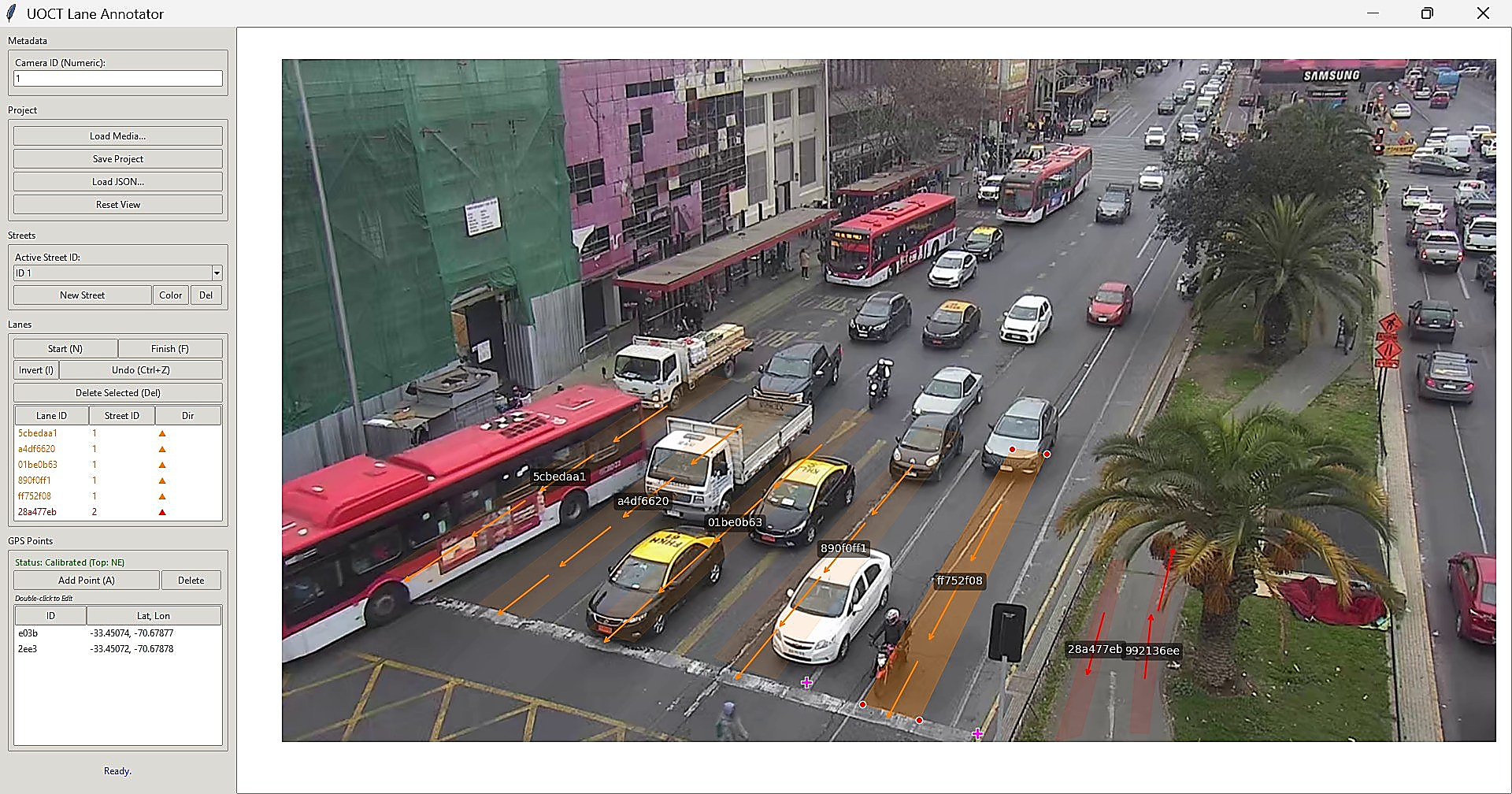
To extract per-lane metrics, I built a desktop annotation tool (UOCT Lane Annotator) that lets operators define lane polygons on camera frames and associate GPS coordinates to them. This produces the geometric mapping needed to assign detections to specific lanes and directions.
Speed Calibration
Converting pixel trajectories to real-world speeds required geometric calibration for each camera. I used Red buses as dynamic references — their physical dimensions are known and they circulate the same streets continuously. By observing multiple buses across frames and combining estimates using inverse-variance fusion, speed estimation error was reduced from 40% to 9.3%.
Output
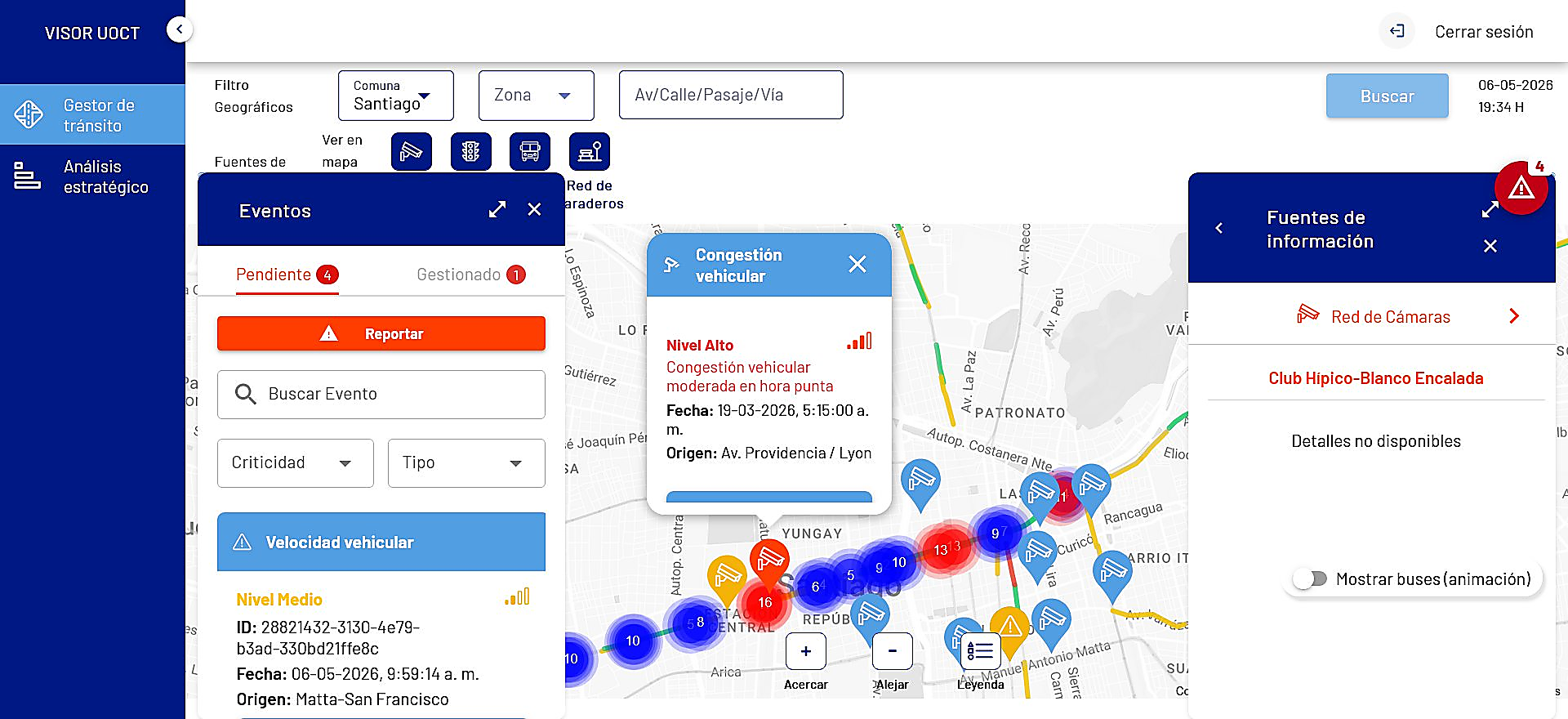
Per-lane metrics — vehicle counts, queue lengths, flow, and speed — are transmitted to Entel's Google Cloud VPC via RabbitMQ. The VISOR UOCT dashboard (built by Entel on GCP) visualizes the data for UOCT operators in real time.
Metrics
+45.3% MOTA · +10.2% IDF1 · 96.3% counting accuracy · Speed error 40% → 9.3%